Mikä tahansa moniydinarkkitehtuuri vaatii sisäistä viestintää viestimään sen eri komponenteista keskenään, mutta on olemassa erityyppisiä yhteenliittämistopologioita, joilla on erilaiset tulokset sisäisen viestinnän suhteen prosessori, The GPU tai mikä tahansa muu prosessori, joka koostuu useista elementeistä, jotka tarvitsevat kommunikointia keskenään. Mikä on yleisimmin käytetty topologiatyyppi?
Suurin osa prosessoreista on nykyään erittäin monimutkaisia kappaleita, jotka koostuvat toisista, mutta yleensä niillä kaikilla on taipumus olla keskeinen tiedonsiirto, joka on vastuussa prosessorin osien kommunikoinnista. Northbridgena tunnetuissa topologioissa on kuitenkin erilaisia topologioita, ja siksi aiomme luetella ne ja selittää järjestelmämme eri prosessoreissa käytetyimmät, olivatpa ne prosessoreita, APU: ita ja jopa GPU: ita.
Jaettu bussiinfrastruktuuri
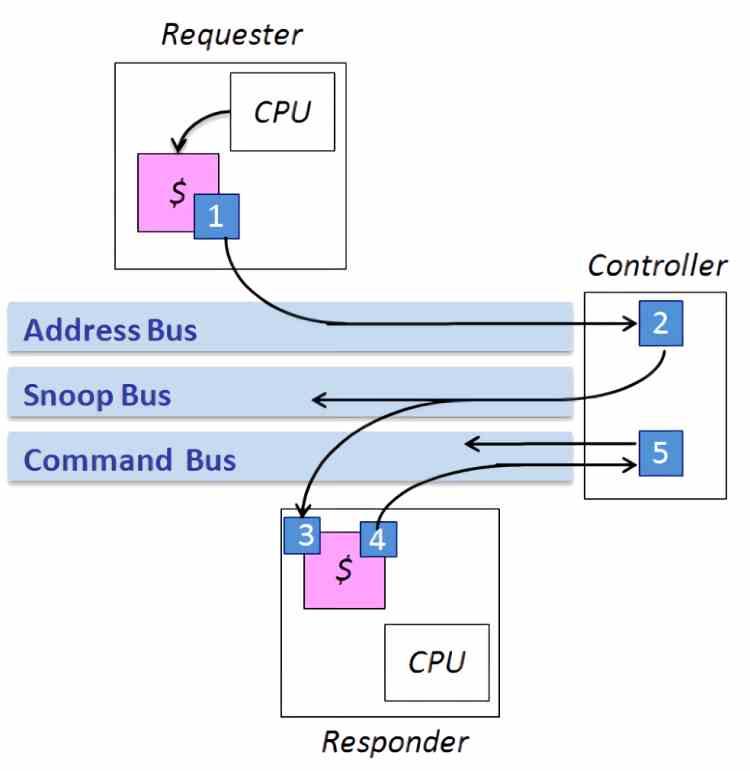
Ensimmäisen tyyppinen topologia, jota meidän on harkittava, on ns. Jaettu väyläinfrastruktuuri tai jaettu bussikangas. Tämän tyyppisillä rajapinnoilla on suuri nopeus, ja niitä käytetään viestimään eri ytimet keskenään ja niiden välimuistit. Mutta se on myös vastuussa pääsyn ulkopuolelle suorittimen ytimille ja siten pääsyn muistiin ja oheislaitteisiin johdonmukaisella tavalla.
Tämä tarkoittaa, että jaetussa väyläinfrastruktuurissa on oltava integroitu joukko mekanismeja, jotta voidaan varmistaa johdonmukaisuus prosessorin komponenttien muistin kanssa. Tässä on selvitettävä, että voimme huomata, että suorittimella ja grafiikkasuoritimella ei ole samaa osoitetta, joten ne eivät ole johdonmukaisia keskenään, mutta saman prosessorin sisäisesti on normaalia, että kaikki komponentit ovat koherentteja tai maksimi mahdollinen johdonmukaisuus. Vaikka APU: issa tätä ei yleensä saavuteta.
Jaettu linja-autoinfrastruktuuri on siis tunnetuksi Northbridgeksi tai pohjoissillaksi, joilla on erityyppisiä topologioita. Tämä on ymmärrettävä tapana, jolla eri komponentit ovat yhteydessä toisiinsa, mikä vaikuttaa latenssiin, toteutuskustannuksiin, energiankulutukseen ja muihin tekijöihin.
Monta kertaa on malleja, joilla ei ole parhaan tyyppistä infrastruktuuria saadakseen kaiken irti prosessoreistaan, mutta se on valittu liittyvien kustannusten vuoksi joko sen toteuttamiseen tarvittavien transistoreiden määrän ja fyysisen fyysisen takia kustannukset, kuten viestintään välitettävä tai lämpötilan muodossa lähetetty energia.
Poikkipalkkikytkin
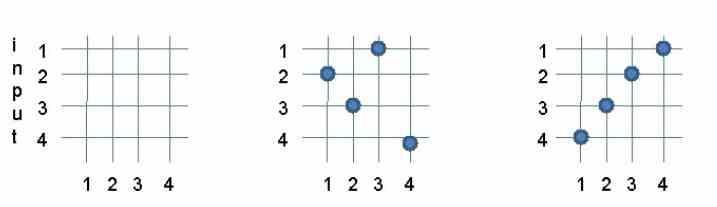
Poikkipalkkikytkin on helpoin visualisoitava topologiatyyppi. Se on eräänlainen verkkoliitäntä, jossa kullakin komponentilla on suora yhteys järjestelmän muihin komponentteihin. Esimerkiksi, jos meillä on prosessori, jossa on 4 komponenttia, meillä on 4 x 4 yksikön ristikkokytkin.
Se on yleisimmin käytetty topologiatyyppi ja suurin etu on, että se sallii useiden viestintöjen suorittamisen rinnakkain. Sen suurin haitta? Koska Crossbar-kytkimeen on kytketty yhä enemmän komponentteja, yhä suurempi koko vie tämän sirun sisään, jolloin keskusyhteysinfrastruktuuri kasvaa yhä enemmän ja saavutetaan hetki, jolloin datan liike vie enemmän tilaa kuin tietojenkäsittely.
Siksi ristikkokytkimet huolimatta siitä, että niitä käytetään eniten, eivät ole ainoa topologiatyyppi, jonka voimme löytää prosessorista, niiden valtava monimutkaisuus saa suunnittelijat käyttämään muun tyyppisiä topologioita.
Sormustopologia
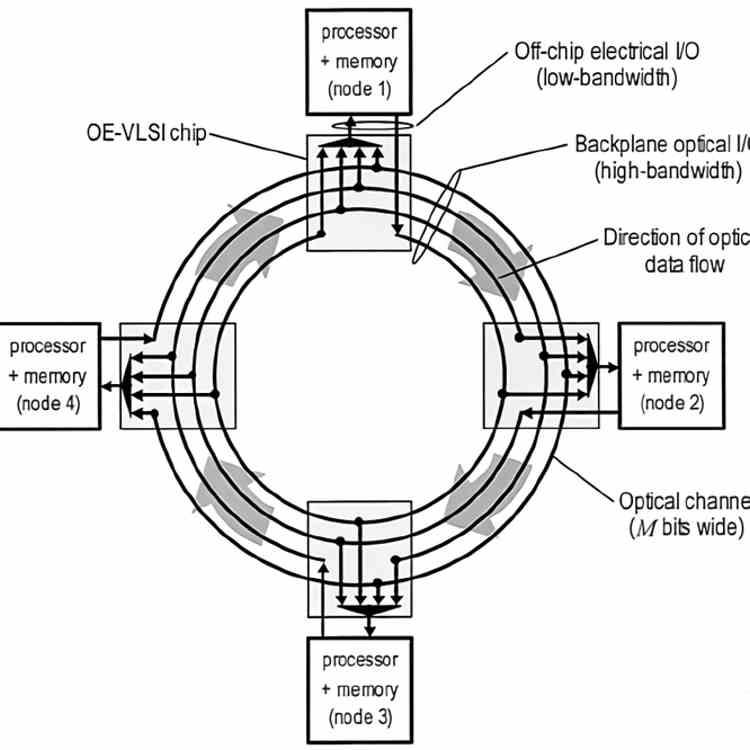
Toinen topologiatyyppi on renkaat, jotta ymmärrämme niiden toiminnan, meidän on tehtävä vertailu todellisuuden kanssa, kuten säteittäiset moottoritiet joissakin kaupungeissa. Jokainen poistuminen naapurustolle tai kaupunginosalle prosessorimme säteittäiseltä moottoritieltä on tietojen syöttö ja ulostulo prosessorin komponenttiin, ja kiertävät ajoneuvot ovat tietopyyntöjä samoista komponenteista ja samoille komponenteille.
Rengasinfrastruktuurissa data kiertää keskirenkaan ympäri. Siksi tiedonsiirto ei ole suoraa ja data poistuu renkaasta vain ohitettuaan määritetyn komponentin edestä. Automaattinen rengasjärjestelmä poimii tiedot ja käskypaketit mainittuun komponenttiin ja kiertää loput. Tämäntyyppisen topologian ongelma on datan nopeus. Tyypillisesti jokaisen jaetun väyläinfrastruktuurin syklin kohdalla renkaan alaosa on edennyt, joten renkaan alaosuuksien määrä vastaa komponenttien lukumäärää, mikä vaikeuttaa skaalaamista luomalla malleja enemmän tai enemmän. vähemmän komponentteja.
Sormukset ovat yksinkertaisin prosessorissa toteutettava infrastruktuurityyppi ja myös halvin toteutettavissa kustannustasolla. Mutta tämän tyyppisessä infrastruktuurissa kukin solmu on kytketty vain kahteen lähimpään naapuriinsa, yksi kutakin osoitetta kohti. Tämä tarkoittaa, että viestinnällä etäisempien komponenttien kanssa on suurempi viive.
Toroidinen topologia
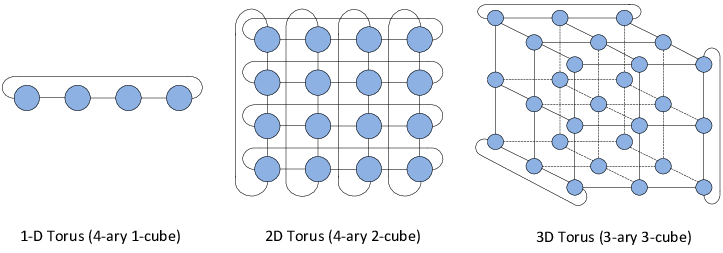
Toroidaalisia infrastruktuureja käytetään laajasti supertietokoneiden maailmassa yhdistämään nopeimmin ja tehokkaimmin eri prosessoreita, jotka on jaettu eri siipiin infrastruktuurin ympärille mahdollisimman tehokkaasti. Vaikka missä ne ovat saavuttaneet suurimman suosionsa viime vuosina, he ovat kohdanneet prosessorit, jotka on suunniteltu nopeuttamaan tekoälyn algoritmeja. Joko sillä tasolla, että viestitään useista ALU: ista keskenään tai eri prosessoreilla.
Ensi silmäyksellä se saattaa muistuttaa poikkipalkkikytkintä, mutta 2-ulotteisen toruksen tapauksessa komponentti voi kommunikoida 4 muun komponentin kanssa samanaikaisesti 2 sijasta renkaan kanssa ja jos puhumme kolmiulotteisesta Torus sitten meillä on, että jokainen komponentti on yhteydessä muihin 3 komponenttiin. Sen visualisoimiseksi on pidettävä mielessä, että toroidisen topologian kukin ulottuvuus sallii kommunikoinnin eri komponenttien kanssa, yhden jokaiselle ulottuvuudelle. Joten yksinkertaistetulla tavalla rengas on yksiulotteinen toroidi-infrastruktuuri.
Puun topologia
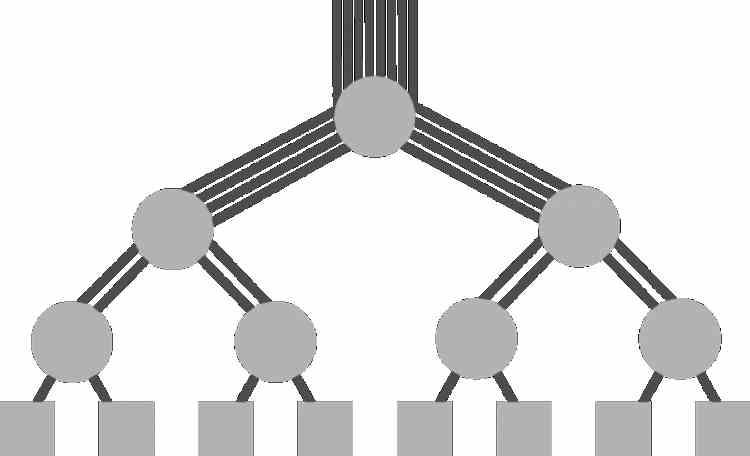
Puun topologia kommunikoi komponentit organisoidussa hierarkkisessa infrastruktuurissa siten, että komponentin käyttö edellyttää kommunikointia hierarkiassa aikaisemmin olevan kanssa. Se on käsite, joka on hyvin samanlainen kuin toroidisen topologian, ja täten sillä on hyvin pieni latenssi, kun komponentit ovat lähellä toisiaan. Siksi latenssi riippuu tasojen lukumäärästä, jonka yksi komponentti on suhteessa toiseen hierarkiassa.
Puun topologian organisaatiolla ei tarvitse olla kiinteää määrää solmuja kullakin sen tasolla, ja se voi olla tältä osin täysin epäsäännöllinen hierarkian tasolta toiselle. Joten siinä suhteessa sillä on suurempi monipuolisuus kuin edellisessä osassa keskustellulla toroidisella topologialla.