V robotice je běžné, že společnosti vyvíjejí stroje, které pomáhají provádět různé práce v továrnách nebo zařízeních nahradit lidskou bytost a tím ušetřit čas i peníze. Vyrábějí se však i malí roboti, kteří jsou schopni dělat různé věci. Například ten druhý je schopen dodává rány velmi rychle.
Nedávno jsme viděli, jak automobilová značka Tesla představila svého humanoidního robota schopného jednoduchých funkcí. Ale i tak byli vytvořeni další roboti, kteří jsou schopni používat a struktura, která simuluje paži chytit různé kousky nebo předměty nebo dokonce točit hamburgery v kuchyních některých restaurací.
Robot, který simuluje útok kudlanky
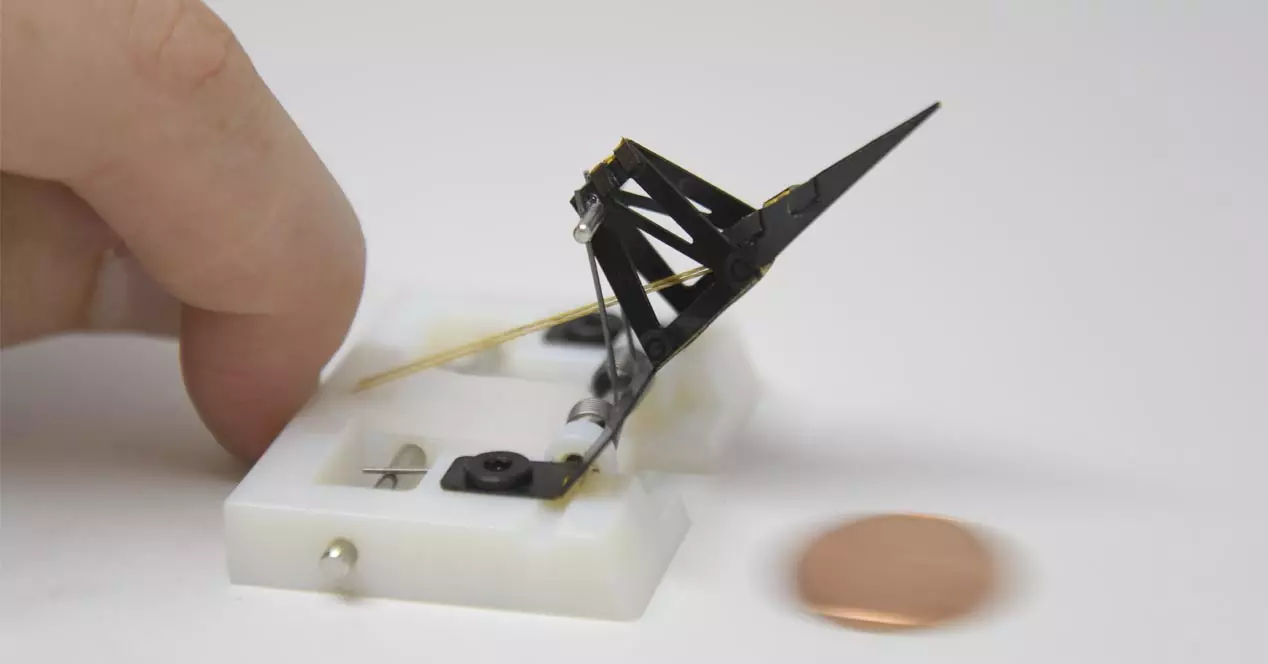
Tento robot může simulovat kudlanku, která se vyznačuje mít velmi rychlý úder. Byl vytvořen uživatelem skupina harvardských vědců a věří, že to může přispět k posílení nových schopností lidských technologií.
Kudlanka k dodání své rány vytváří tlak ve svalech, který se uvolňuje dopředu velmi rychle. Ve šlachách těchto svalů jsou dvě malé struktury zvané sklerity, které drží svaly zpět, ale pak umožňují uloženou energii být propuštěn najednou.
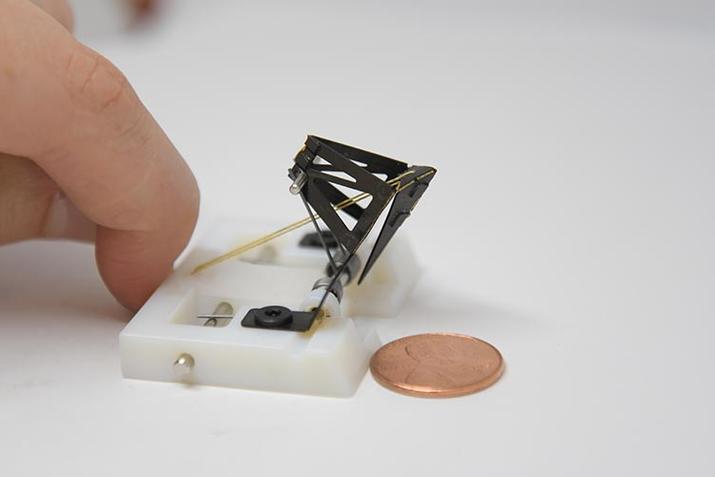
Vědci z Harvardu si to však přáli vytvořením své loupeže vylepšit tento systém. Tento malý stroj váží jen jeden a půl gramu.
Robot nemá stejnou kapacitu vrtání jako kudlanka, ale může se pohybovat rychleji než jakékoli jiné podobné zařízení, jaké kdy bylo vyrobeno. Jeho paže může dosáhnout rychlosti 26 metrů za sekundu.
Může to být budoucí funkce pro některé stroje
Zpomalené snímky byl zkontrolován pohyb robota i kudlanky a byl učiněn závěr, že po uvolnění skleritů slouží struktura svalů jako druh sekundární západky. To pomáhá ovládat pohyb a držet ho na místě, dokud nedojde k bodu zvratu, který způsobí střílet dopředu.
Díky tomuto procesu se uložená elastická energie uvolní a je zlepšena mechanická výroba systému. Student ujistil, že proces geometrického zaháknutí odhaluje, jak organismy generují velmi vysoké zrychlení v těchto pohybech, které jsou rychlé jako údery.
Vytvoření tohoto mechanismu v robotu tedy může představovat nová funkce který by mohl být aplikován na jiné roboty i na jiná zařízení.